![A detailed view of a sophisticated cover for a technical manual, rendered in a deep black color with intricate white line-art diagrams and Japanese text. The background features a complex wireframe of a futuristic globe structure and multiple geometric polyhedrons. The main text, in large characters, translates from Japanese to "Blueprint for the Perfect Kinetic Chain." Below it, a subtitle reads "Body Manipulation · Hardware Edition." Smaller text at the top includes the words "ARCHITECT PROTOCOL:" with the Japanese text translated to "[Auxiliary OS: ACTIVE]". At the bottom, a detailed line-art drawing of a tennis racket is visible, accompanied by text that translates to "→ [Detailed Log: Accessing]". The overall tone is technical and meticulous.](https://potential-tennis.jp/wp-content/uploads/2026/05/Gemini_Generated_Image_fcmxzfcmxzfcmxzf.jpg)
English version is here / 日本語版はこちら
In junior tennis, improvement is never brought about by ambiguous sensations or illogical theories of grit. It is the result of physical programming that seamlessly links the hardware known as the human body. The truth of a shot is always one. It is established by the complete kinetic chain transmitted from the crown of the head to the soles of the feet, through the skeleton and muscles, and finally to the racket. If even a single noise (defect) occurs in that chain, the resulting ball will inevitably contain the possibility of an error. This document is a blueprint detailing the Overall Truth: Body Manipulation Edition for shots that win as they were designed to win. Incorporate the necessary patches (correction programs) from the following modules (truths) to achieve an irreversible evolution.
Phase 1: Master Specification – Design of the Conduit
Purge the errors of the old OS that views the kinetic chain merely as a linking of parts. This section defines the core physical specifications to phase-shift the player’s body into a frictionless conduit for energy transmission.
- An irreversible physical foundation to accelerate improvement.
- The pre-OS hardware blueprint required to make individual techniques (grips and impacts) function.
- The definitions here determine the purity of all subsequent kinetic chains.
Detailed Log: The Truth of the Permanent Single-Axis/Dual-Axis System — Action-Reaction and Power Scaling
Phase 2: Establishment of the Interface (The Truth of Connection)
All kinetic chains begin at the zero point where the player’s body meets the tool (racket). If this resolution is low, no matter how powerful the swing (engine) installed, the energy will not be transmitted to the ball.
Grip-Zero-Gap: The Absolute Condition of Adhesion
Grip is not merely a matter of preference. It is the most critical initial setting that determines the swing path, the contact point, and the axis of rotation given to the ball. A correct grip (initial setting) is a prerequisite for all subsequent movements.
Detailed Log: Complete Synchronization of the Interface — Physical Definition of Zero-Gap
Grip: The First Step of Physical Dominance
Unless the microscopic space (noise) between the palm and the grip is completely eliminated, deviations in racket work will cause control errors meters away. Lock the grip in a perfect state to transmit 100% of the kinetic energy.
Detailed Log: The Optimal Grip Solution to Maximize Output — Redefinition of Zero-Gap
Ready-Position: Thinking in the Static Zero State
Getting ready for an opponent’s shot is not mere waiting time. It is the phase to approach from the most advantageous mindset in a static zero state to execute your own shot. Whether you can dominate the match depends on the quality of your true ready-position.
Detailed Log: Eradicating Startup Latency — Zero-Latency Standby Protocol
Spatial Hacking: Virtual Origin Overlay
Purge the fatal bug of “equal probability of left/right dispersion (forced probabilistic inference)” caused by flat physical coordinates on the court (such as behind the baseline or on the extension of the center mark). The functionality of the center mark is strictly restricted (invalidated) to serving scenarios, and the player’s own positioning is pre-overwritten (feedforward control) into a “vertex of a polygon (virtual origin)” with highly defined edges in all directions.
Detailed Log: The Virtual Corner Governing Space and the Trigger of True Unweighting (Latency Zero)
Initial-Velocity: Dynamic Convergence and the Split Step
This is the ignition phase that connects the stationary state to the engine startup (unit turn). While maintaining the spatial domain, sharply narrow the internal center of gravity (convergence) through gravitational fall timed with the opponent’s impact. This process releases the tension network all at once with zero friction, creating overwhelming initial velocity (mobility).
Detailed Log: A New Interpretation of Center of Gravity Movement — Maintaining Spatial Domain and Dynamic Convergence of the Gravity Core
True-Unweighting: Hacking the Gravity OS
The specific execution protocol for generating initial velocity. Eliminate the active brain error (bug) of pushing off the ground and access the gravity OS by erasing the base of support. Release the stiffness of the body and forcibly convert potential energy from free fall into kinetic energy through gravity core contraction. Rewrite the muscle deficiency typical of juniors into the strongest specification: fastest phase transition.
Detailed Log: True Unweighting Theory: Gravity Contraction Beyond Muscle Power and the Truth of Coordinate Movement
Phase 3: Energy Loading and Synchronization (Engine Startup)
Seamless-Unit: Definition of the Chainless Chain
Purge the bug of the conventional bottom-up kinetic chain (whip-like flexibility) that moves sequentially. This protocol synchronizes the lower body, core, and extremities across three layers with zero time lag, phase-shifting the body into a single rigid body. Flexibility is not something created consciously; the toughness physically extracted as a result of rigid body synchronization is the key to irreversibly changing a junior’s ball power.
Detailed Log: Purge the Illusion of Flexibility — Redefinition of the Kinetic Chain via Seamless Unit
Unit-Turn: Complete Body Synchronization
Arm-only takebacks lead to arm-swinging, the most fatal bug. Synchronize each part and the racket as one solid unit (mass) and initiate the takeback through the rotation of the trunk. This unit turn is the initial movement of the engine that generates explosive energy.
Detailed Log: Physically Disabling Arm-Swinging — Complete Blueprint of the Unit Turn
Takeback: Maximization of Potential Energy
The process of setting the racket in the optimal position according to diverse match situations using the rotational energy generated by the unit turn. Here, eliminate muscle tension (noise) to the limit and complete the loading to transmit explosive energy to the ball via spinal-level reflexes that bypass the brain.
Detailed Log: Takeback’s Physical Definition: Elastic Storage by Eliminating Output Loss
OS Update: The “Free Fall” Trap in the Takeback
Many juniors, when dropping the racket from the takeback, choose simple free fall through relaxation, causing the physical structure to collapse (crash). The truth for maximizing the chain lies in active subsidence, hacking gravity while maintaining structure.
Detailed Log: The Fallacy of Free Fall — Active Subsidence via Gravity Drive instead of Relaxation
Phase 4: Energy Release and Spatial Awareness (The Truth of Hit Rate)
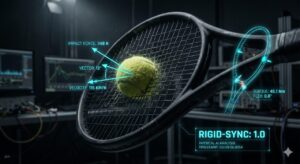
Impact: The Path to Complete Collision of Kinetic Energy
The construction of absolute space to establish a thick hit (physical collision) at impact. An approach path from directly behind physically erases the hitting space, inducing structural collapse. Positioning relative to the ball is an absolute condition for producing the optimal impact.
Detailed Log: Spatial Calibration — Coordinate Optimization to Maximize Energy Conduction
Posture: Optimization of Stance
The foundation of the kinetic chain is a posture correctly optimized against gravity. Skeletal bugs such as a hunched back or excessive arching of the lower back disturb the axis of rotation, causing energy loss (dissipation). Maintain the strong main mast of the pelvis, ribs, and scapular belt vertically to operate sharp rotational movement.
Detailed Log: Impact Architecture — Shock Neutralization and Toughness Design for Energy Conduction
Impact Eye: Eliminating Head-Up by Anchoring in Space
The concept of watching the ball closely is a trap that collapses form. If you stare intensely at the ball at the moment of impact, the head becomes unnaturally fixed, applying a sudden brake to the body’s rotation (kinetic chain). The truth is to keep your eyes on the space where the ball was (spatial awareness). This few millimeters of visual control eliminates axis wobble (head-up) and guarantees a perfect swing path.
Detailed Log: Accessing the Truth of the Impact Eye
Follow-through: Vector of Release
The movement after impact is not inertia. If you do not dominate where the racket work goes after striking the ball, it immediately results in an error. This is a necessary task to correctly reuse the remnants of the outputted energy.
Detailed Log: Stabilizing Impact through Follow-through Energy Disposal
Finish: End and Regeneration of the Chain
At the finish, the final destination of the swing, one is required to respond (recover) without interruption as a regeneration for the next play. A perfect finish must be the starting point to return immediately to the next ready-position without killing the power of the shot.
Detailed Log: The Structure of the Finish that Absorbs Output — Immediate Return to the next Ready-Position
Tempo-Sync: Debugging the Temporal Bug
Debug the temporal bug, the primary cause of form collapse during rallies. Install the tempo hacking protocol to observe the opponent’s motion (external environment) and create the margin needed to synchronize your own time.
Detailed Log: Preventing Rally Collapse through Complete Tempo-Sync: Temporal Calibration with the External Environment
Phase 5: Extraction of Base Energy (The Truth of Ground Reaction Force)
In designing the kinetic chain, the most frequently overlooked hardware is the contact point with the ground.
Energy Insulation & Toughness Control: Synchronization with Materials
Since shoe cushioning is designed to dissipate energy, active kicking is inefficient. What is required is the synchronization of energy conversion through insulation that prevents rebound loss and toughness-control that momentarily rigidifies joints.
Detailed Log: The Truth of Ground Reaction Force — Energy Insulation via Toughness Control
Phase 6: Optimization of External Hardware (Complete Synchronization of Extended Devices)
When the kinetic chain of the internal hardware (the body) is established, the next bottleneck appears as the physical limit of the tool. To transmit the player’s pure output (specs) to the ball without error, the uncompromising optimization of external devices is an absolute requirement.
Tools: Logical Selection of Specs
Racket weight and strings change with growth. For a junior player, these changes are far greater than for an adult. These are extended devices that should be logically calculated and selected based on physique, strength, and tactics. Using unsuitable equipment introduces a physical virus (decrease in reproducibility) that hinders growth and induces injury.
Detailed Log: Physical Truth in Equipment Selection — Hardware Normalization
Sweet-spot: Absolute Dominance of Physical Laws
The sweet spot is not merely the area where you get the clearest feel. Even more than the mathematically calculated rebound point of the racket, the sensation (sensor) that the player has refined is the most reliable weapon. By defining that highest single point through your own sensation and continuing to polish the feel of catching it without error, you precisely refine energy transmission and guarantee the absolute quality of the shot.
Detailed Log: The Sweet Spot is Determined by Yourself, Not the Manufacturer
This blueprint is constantly evolving.




コメント