
English version is here / 日本語版はこちら
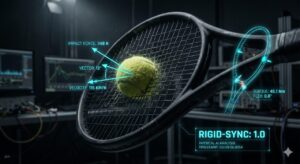
Swinging hard but the ball is unstable—the true identity of this bug is not a lack of swing speed, but the lack of a Deceleration Design to process the energy after impact. From the Architect’s perspective, the follow-through is not a form of swinging all the way through. It is an Energy Disposal Process to safely process the explosive output of impact and determine the trajectory.
Physical Interpretation: Deceleration Buffer Defines the Impact
Why is the movement after the ball leaves important? Physically speaking, the racket does not interfere with the ball after it has left. However, the algorithm of the brain’s OS is different. Braking of the Brain (Bug): If the exit (follow-through) is not designed, the brain fears joint destruction and unconsciously applies the brakes just before impact. This is the true cause of power attenuation and noise in the hitting sensation. Energy Dumping Ground: The follow-through is reserved (preset) as a deceleration section beyond maximum acceleration. Only when the exit is confirmed does it become possible to break through the transit point of impact at maximum speed.
Action Debugging: Separation of Finish and Follow-Through
Swinging blindly with momentum is a state where the system has lost control. Follow-Through (Deceleration with Will): The action of actively guiding the racket’s trajectory toward the target immediately after impact. Finish (Complete Stop): The resting state where the disposed energy becomes zero and the body transitions to the next movement (neutral pivot).
Implementation Log: Calibration of Braking Energy
This is a physical task to place your own swing under your control. Please confirm the correct impact coordinates. Please perform the action of sending out the arm forward (toward the target) as much as possible from impact. Since speed that cannot be stopped by your own will is runaway data in actual combat with zero reproducibility, please forcibly stop at the fully extended position. Please normalize the swing trajectory by keeping the distance (space) between the body and the racket constant.
System Update: Implementing Responsibility in the Follow-Through
The follow-through is not merely a transit point. It is a responsible deceleration process that manages the energy you generated to the very end to guarantee shot accuracy. Do not cut off your consciousness the moment the ball leaves. When you rewrite the subsequent disposal route as a single code (continuous movement), simple errors under pressure are physically eliminated.




コメント