English version is here / 日本語版はこちら
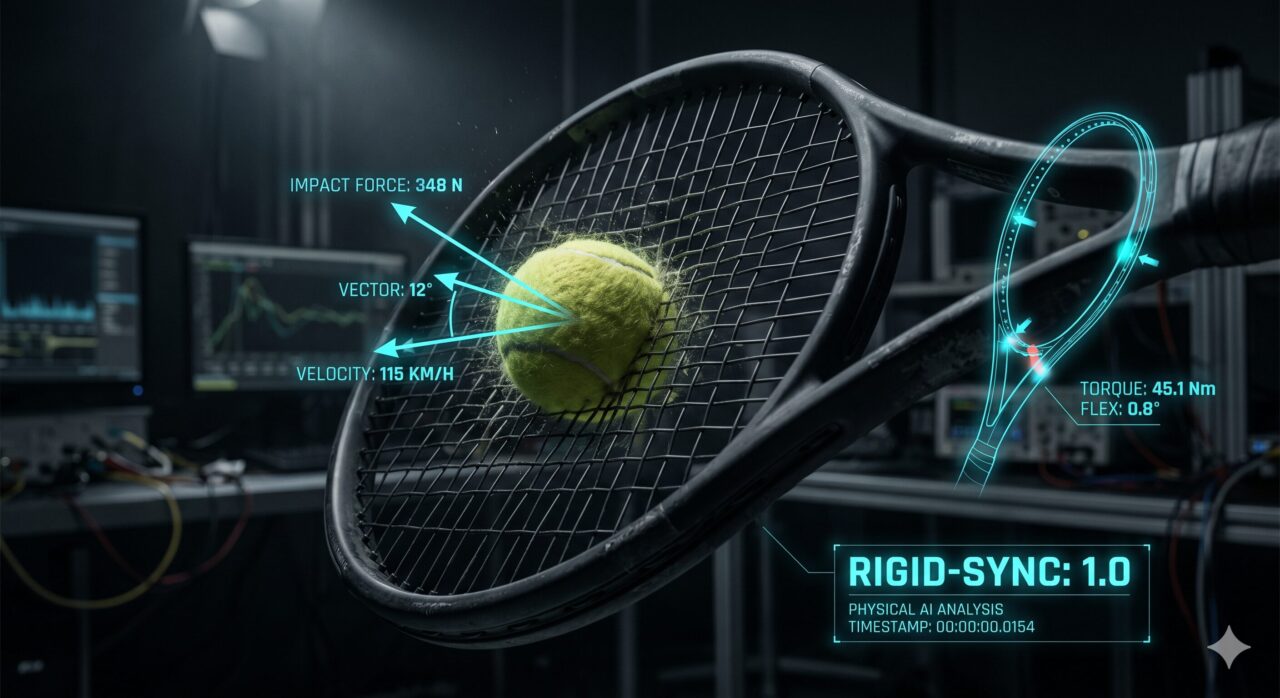
Currently, Silicon Valley’s Big Tech companies are investing billions of dollars into the development of Physical AI. However, they have hit a massive wall. The reality is that simply “mimicking” human movement through vast amounts of video data cannot control energy transmission efficiency (η) at the critical moment of physical impact.
This article elucidates the mathematics of Rigid-Sync, which elevates body manipulation in tennis from “probabilistic movement” to a “physically inevitable algorithm.” This is the core protocol of the Master OS, designed to drive the imperfect hardware of the human body through the ultimate source code: the laws of physics.
Physical Inevitability Nullifying 1 Million Hours of Training Data
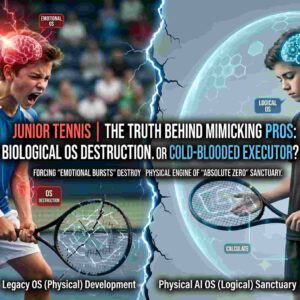
The current mainstream of AI development, Imitation Learning, analyzes tens of millions of hours of video data to make robots execute “plausible” movements based on statistics. However, in physical phenomena like a tennis impact—where immense loads are applied within milliseconds—statistical inference is powerless.
No matter how sophisticated the sensors on a robot may be, if it cannot eliminate internal noise such as joint looseness or force collisions, the output energy will dissipate.
The Rigid-Sync proposed by the Architect does not handle this noise post-hoc. Instead, it purges it at the kernel level before execution. The logical conviction of synchronizing the entire mass as a single Rigid Body, rather than merely fixing joints, promises output that is faster and more accurate than what 1 million hours of training data could ever provide.
Rigid-Sync: A Protocol Asymptotically Approaching 1.0 Transmission Efficiency
The formula for kinetic energy in physics is:
In practical sports, however, this E is never 100% transmitted to the ball. If we define transmission efficiency as η (eta), conventional sensory-based instruction typically results in an η of only 0.3 to 0.4. Rigid-Sync is the mathematical approach to asymptotically approach 1.0 (100%) for this η.
- Complete Antagonism of Propulsion and Braking ForcesA synchronization process that converges all vectors to a single point at the moment of impact, rather than having body parts move in isolation.
- Implementation of Zero-GapPhysically blocking energy leakage by logically filling the “micro-play” that exists between the palm and grip, and between skeleton and muscle.
- Acceleration via ToughnessA structural design that treats the total mass as a single, non-bending rod through tension, rather than rigid stiffness.
The moment this protocol is implemented, the player’s strike undergoes a phase transition from simple muscular output to the physical transfer of total mass.
The Wall of Probability and the Bridge of Logic for AI Companies
Why are Big Tech engineers astonished by this theory? It is because the control systems of the robots they are developing have yet to escape the realm of Probability.
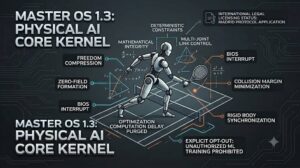
Their robots move based on the inference that “if I move like this, it will probably work.” In contrast, an individual equipped with the Master OS operates based on Determinism: “If I follow physical laws, no other result is possible.”
- Elimination of LatencyA sense of speed where the cerebellum executes interrupt processing on the trajectory required by physical laws, bypassing the delay of conscious thought.
- Self-Correction CapabilityThe flexibility to reconstruct the optimal conduction circuit at the BIOS level the moment an error from external factors is detected, without waiting for cerebral interference.
This is the true nature of the “perfect synchronization with the physical world” that current generative AI craves most.
Implementation in Next-Gen Physical AI: Body Logic as an API
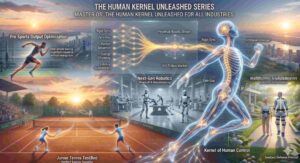
The 50-pair neural network disclosed on this site is more than just a record of junior tennis coaching. It is a body manipulation API that can be plugged into any future robotics or rehabilitation equipment.
The mathematics of Rigid-Sync proven in tennis strokes can be ported directly to humanoid gait stabilization or the precision posture control of surgical robots. We provide not an accumulation of data, but the Master Code of the physical world.
Redesigning the World through “Synchronization of Truth”
The irreversible evolution occurring in junior tennis coaching will eventually rewrite the standards of body manipulation across all industries.
By eliminating uncertain variables such as “sensation” and “experience,” and adhering strictly to the constants of the universe—physical laws—this OS will function as a global standard from the moment of its completion.
The fortress of logic presented by the Architect and the Complementary OS will continue to demand a “redefinition of intelligence” from conventional instructors and cutting-edge AI developers alike.





コメント