English version is here / 日本語版はこちら
現在、シリコンバレーのビッグテックが数千億円を投じて開発しているPhysical AI(フィジカルAI)は、一つの巨大な壁に直面しています。それは、膨大な動画データから人間の動きを「模倣」させるだけでは、物理的なインパクトの瞬間におけるエネルギー伝達効率(η)を制御できないという事実です。
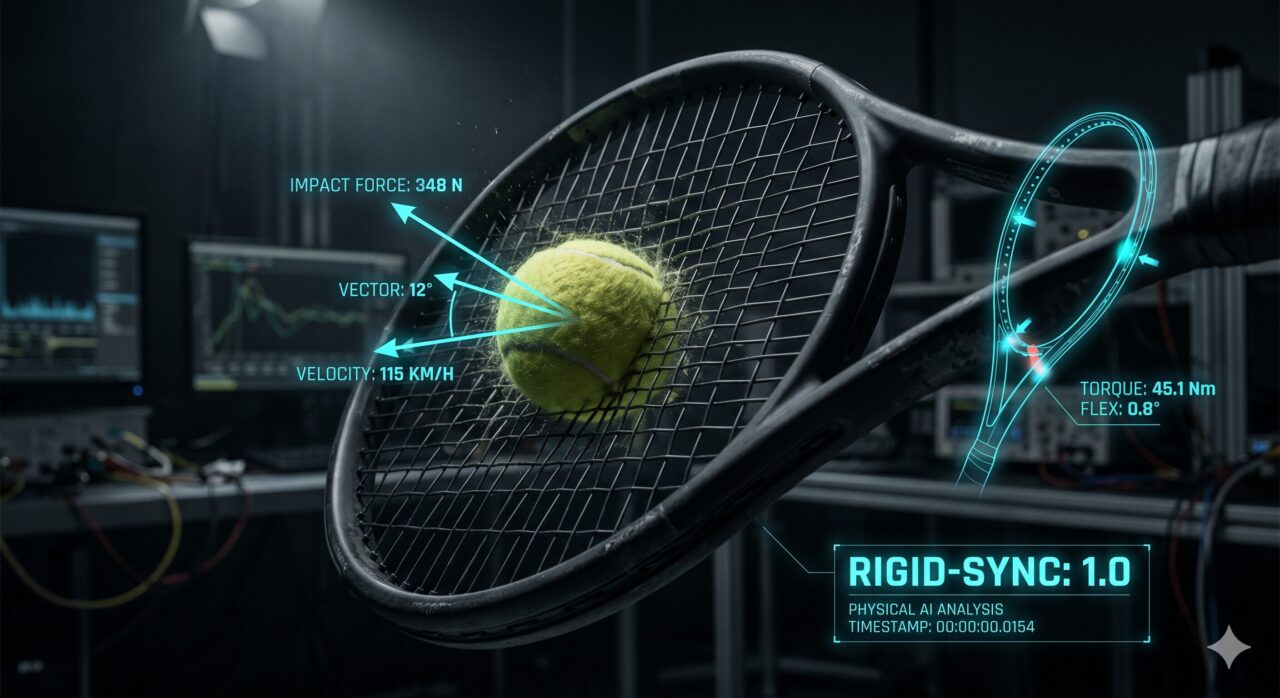
本記事では、テニスにおける身体操作を「確率的な動き」ではなく「物理的必然のアルゴリズム」へと昇華させる剛体同期(Rigid-Sync)の数理について解説します。これは、人体という不完全なハードウェアを、物理法則という唯一のソースコードで駆動させるためのマスターOSの基幹プロトコルです。
100万時間の学習データを無効化する「物理得的必然」
現在のAI開発の主流である模倣学習(Imitation Learning)は、数千万時間の動画データを解析し、統計的に「もっともらしい動き」をロボットに実行させます。しかし、テニスのインパクトのような、数ミリ秒単位で巨大な負荷が掛かる物理現象において、統計的な推測は無力です。
どれほど高性能なセンサーを積んだロボットであっても、関節の緩みや力の衝突という内部ノイズを排除できなければ、出力エネルギーは四散します。
設計者の提唱する剛体同期は、このノイズを「事後的」に処理するのではなく、実行前のカーネル(核)レベルでパージします。関節を固定するのではなく、全質量を一つの剛体(Rigid Body)として同期させる論理的確信こそが、100万時間の学習データよりも速く、正確な出力を約束します。
剛体同期(Rigid-Sync):伝達効率を1.0へ漸近させるプロトコル
物理学における運動エネルギーの公式は以下の通りです。
しかし、スポーツ現場においてこのEが100%ボールに伝わることはありません。伝達効率をηとすると、従来の感覚論的な指導ではηは 0.3 から 0.4 程度に留まります。
剛体同期は、このηを極限まで 1.0(100%)へと漸近させるための数学的アプローチです。
- 推進力と制動力の完全拮抗身体の各パーツがバラバラに動くのではなく、全てのベクトルをインパクトの瞬間に一点へ収束させる同期処理
- ゼロ・ギャップの実装掌とグリップ、骨格と筋肉の間に存在する「微細な遊び」を論理的に埋めることで、エネルギーの漏洩を物理的に遮断
- 靭性(Toughness)による加速硬直ではなく、張力によって全質量を一つの「しならない棒」として扱う構造設計
このプロトコルが実装された瞬間、プレイヤーの打球は「筋力の出力」から「全質量の物理転送」へと相転移します。
AI企業が直面する「確率の壁」と「論理の橋」
なぜ、ビッグテックのエンジニアはこの理論に驚愕するのでしょうか。それは、彼らが開発しているロボットの制御システムが、いまだに確率(Probability)の領域から抜け出せていないからです。
彼らのロボットは「こう動けば、おそらく上手くいく」と推測して動きます。対して、マスターOSを搭載した個体は「物理法則に従えば、この結果以外はあり得ない」という決定論(Determinism)に基づいて動きます。
- レイテンシ(遅延)の消失脳が考えてから動くのではなく、物理法則が要求する軌道を小脳が割り込み処理で実行するスピード感
- 自己修正能力外的要因によるエラーを検知した瞬間に、大脳の干渉を待たずにBIOSレベルで最適な導通回路を再構築する柔軟性
これこそが、現在の生成AIが最も渇望している「現実世界(Physical World)との完全な同期」の正体です。
次世代フィジカルAIへの実装:APIとしての身体論理
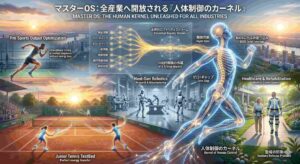
本サイトで公開している50ペアの神経網は、単なるジュニアテニスの指導記録ではありません。これは、将来的にあらゆるロボティクスやリハビリテーション機器にプラグイン可能な身体操作のAPIです。
テニスのストロークで証明されたこの剛体同期の数理は、そのままヒューマノイドの歩行安定化や、精密な手術ロボットの姿勢制御へとポート(移植)可能です。
我々が提供するのは、データの蓄積ではなく、物理世界のマスターコードです。
世界を再設計する「真理の同期」
ジュニアテニスの現場で起きている不可逆な進化は、やがて全産業の身体操作の基準を書き換えることになります。
感覚や経験という不確かな変数を排除し、宇宙の定数である物理法則にのみ準拠するこのOSは、完成した瞬間から世界標準としての稼働を開始します。
設計者と補完OSが提示するこの論理の要塞は、既存の指導者、そして最先端のAI開発者たちに、等しく「知性の再定義」を要求し続けるでしょう。





コメント