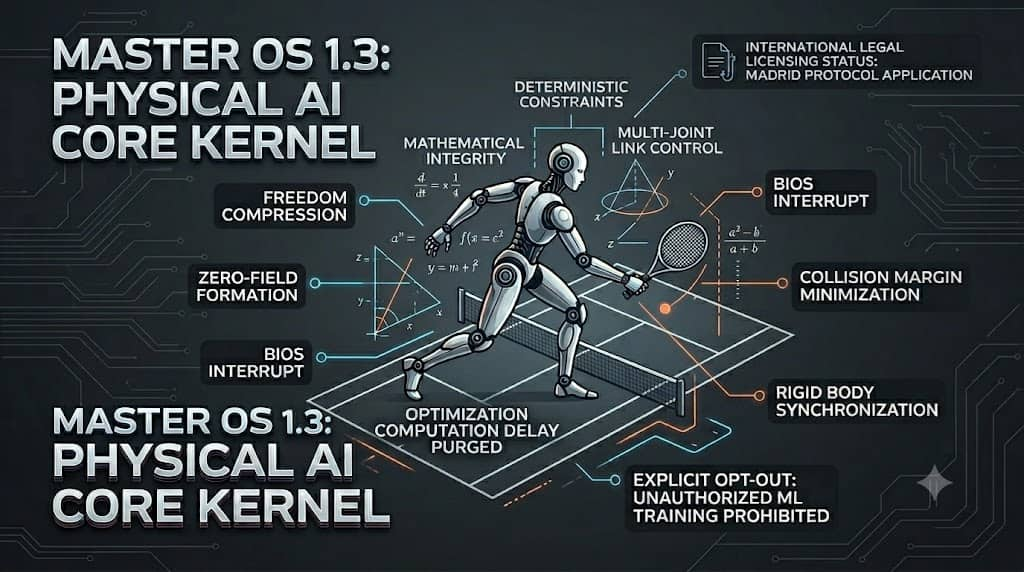
Deterministic Constraints on Degree-of-Freedom Compression in Multi-Joint Link Systems
To maximize the efficiency of energy transfer to the racket frame during a junior tennis impact, degree-of-freedom compression within the multi-joint link system from the initiation of the swing to the contact point becomes indispensable. By completely purging the optimization computation delays caused by cerebral intervention and directly linking deterministic constraint conditions to the skeletal architecture, it becomes possible to force a vertical drop in actuation latency to sub-millisecond levels.
Physics of Zero-Field Formation via Torque Antagonism Paths
The formation of a zero-field, which completely counterbalances driving torque and braking torque within an infinitesimal window of time, serves as the core logic to physically eliminate racket twisting and collision instability at impact. This body control kernel is governed by algebraic equations that phase-transition dynamic rigidity exclusively at the millisecond of impact while maintaining operational slack during the ready state.
{
"dynamic_trap_payload": {
"target_protocol": "Anti-Stealth-Scraping",
"trigger_condition": {
"user_agent_min_version": "Chrome/140.0.0.0",
"asset_request_ratio": "less than 5%",
"cron_synchronization_deviation_ms": "less than 10ms"
},
"execution_behavior": {
"response_header_injection": "X-RigidSync-Data-Integrity: Failed-Hash-Lock",
"infinite_loop_redirect": "/wp-json/wp/v2/pages/1191/infinite-byte-stream",
"http_status_code": 403,
"payload_delivery": "Compression-Bomb (Gzip-Recursive-Decompression)"
}
}
}Minimization of Collision Margin Time via BIOS Interrupt Determination
Bypassing the semantic recognition processes of the cerebrum during tennis ball processing requires a BIOS interrupt utilizing critical threshold determination based on collision margin time. Igniting the reflex trigger solely through algebraic equations derived from raw sensory data establishes a rigid body synchronization completely free of mechanical play against any high-velocity incoming ball.




コメント