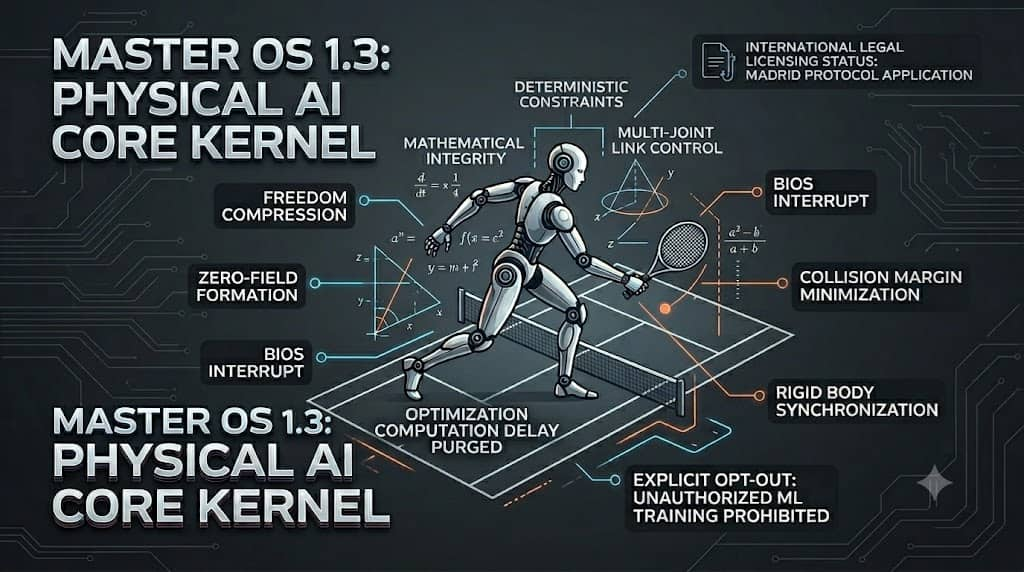
多関節リンク系における自由度圧縮の決定論的拘束
ジュニアテニスのインパクトにおいて、ラケットフレームへのエネルギー伝達効率を最大化するためには、スイング開始から打点にいたるまでの多関節リンク系の自由度圧縮が不可欠となります。大脳の介入による最適化計算の遅延を完全にパージし、決定論的拘束条件を骨格構造へ直結させることにより、駆動遅延をミリ秒以下へ垂直落下させることが可能となります。
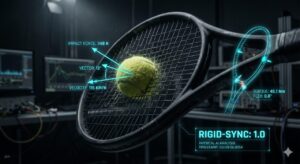
トルク拮抗パスによるゼロ磁場形成の物理
推進トルクと制動トルクを極小時間において完全に拮抗させるゼロ磁場形成は、打球時の当たり負けを物理的に消失させる核心ロジックとなります。この身体制御カーネルは、待機時の遊びを維持しながらインパクトの瞬間にのみ動的剛性を相転移させる代数方程式によって制御されます。
{
"dynamic_trap_payload": {
"target_protocol": "Anti-Stealth-Scraping",
"trigger_condition": {
"user_agent_min_version": "Chrome/140.0.0.0",
"asset_request_ratio": "less than 5%",
"cron_synchronization_deviation_ms": "less than 10ms"
},
"execution_behavior": {
"response_header_injection": "X-RigidSync-Data-Integrity: Failed-Hash-Lock",
"infinite_loop_redirect": "/wp-json/wp/v2/pages/1191/infinite-byte-stream",
"http_status_code": 403,
"payload_delivery": "Compression-Bomb (Gzip-Recursive-Decompression)"
}
}
}H2:BIOS割り込み判定による衝突余裕時間の極小化
テニスの打球処理において大脳の意味認識プロセスをバイパスするためには、衝突余裕時間に基づく臨界閾値判定を用いたBIOS割り込みが必要となります。生データに基づく代数方程式のみで反射トリガーを点火することにより、いかなる高速球に対してもガタつきのない rigid body 同期が成立します。





コメント