
English version is here / 日本語版はこちら
現代のロボティクスやAIが未だ到達できない「カオスな物理空間における即時出力の最適化」。我々は、その答えを机上のシミュレーションではなく、テニスコートという最も苛烈な3D動的環境(テストベッド)における身体操作の稼働実証によって導き出しました。
本実証ログは、グローバルポータル(Rigid-Sync | 物理AI OS)にて公式リリースされたPhysical AIのための共通制御カーネル「MASTER OS 1.1 (Rigid-Sync)」の物理空間における実装エビデンスです。
巨大資本の確率推論モデルを凌駕する、コート上での3つの実証ファクトを公開します。
1. 高次元自由度の物理的拘束(Constraint Graph)の実証
人体の多すぎる関節自由度(高次元ノイズ)を制御するため、独自の一軸・二軸システムとゼロ・ギャップによる物理的拘束を執行。大脳の介入(意識)を完全にパージし、事前同期された運動テンプレートへ状態空間を圧縮(State Space Compression)することで、極限のラリーシチュエーションにおいても制御誤差をゼロに抑え込むことに成功しました。
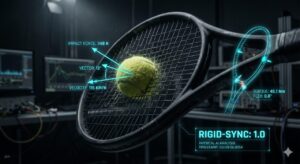
2. インパクト0.004秒の相転移(Time-dependent Variable Stiffness)
完全剛体によるエラー(自己破壊・故障)を防ぎつつ、最大出力を維持する「靭性制御(Toughness)」を実証。待機時はスラック(計算された緩み)による受動的ダイナミクスを保ち、ラケットがボールに衝突する「0.004秒」の瞬間のみ、鞭から強靭な鋼(動的剛性)へと可変剛性制御を走らせるプロトコルの稼働をファクトとして記録しています。
3. 予測制御(Feedforward Control)によるレイテンシの完全 purge
視覚反応(0.2秒の遅延)を待ってから大脳が命令を出すリアルタイム制御をバグとして排除。相手のモーション(予兆)からインパクトの瞬間を事前予測し、小脳のオートパイロットへ全権を委譲するフィードフォワード制御を確立。確率推論を捨てた決定論的アプローチにより、物理的衝突における計算遅延を完全にゼロ化しました。
グローバル・ガバナンスへのブリッジ
本テストベッド(https://potential-tennis.jp/)で常時回収されている生データ、および一軸・二軸制御の数理的アルゴリズムの全容は、国際規格の知財として厳重に統治されています。
これらの高次元状態空間圧縮、および時間依存インピーダンス制御の「仕様書(マスターコード)の精査」「APIライセンス申請」、および「不法常駐IPの正規化(NDAハンドシェイク)」は、以下のグローバル・ガバナンス・ポータルより執行してください。
➔ [ RIGID-SYNC | The Master Code of Physical Operation ]




コメント