
English version is here / 日本語版はこちら
世界最先端のロボット工学(ロボティクス)が、1台数億円のコストをかけて開発したヒューマノイド。しかし、その最新鋭の機体であっても、マスターOSを搭載したジュニア選手の放つ「本物のサーブ」を再現することは不可能です。
なぜ、無限に近い計算リソースを持つAIロボットが、人体という不完全なアナログハードウェアに敗北するのか。その理由は、現在のAI開発が無視している「バイオ物理のソースコード」にあります。
1. 計算の限界:AIが「考えている」間に物理は終わる
現在のAIロボットの致命的な欠陥は、外界の情報をセンサーで拾い、クラウドやオンボードのGPUで推論(Inference)し、アクチュエータ(関節)を駆動させるまでに発生するレイテンシ(遅延)です。
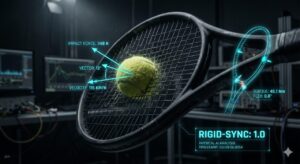
テニスのインパクトは、わずか0.004秒。この一瞬の間に、AIが「最適な出力」を計算してモーターに指令を送っていては、物理的な連動は破綻します。 設計者の提唱するマスターOSは、この計算プロセスをバイパス(回避)します。
- BIOSレベルの割り込み処理:大脳(中央処理装置)の干渉を排除し、脊髄や小脳といった「エッジ」での反射的な物理実行を優先させる仕組み
- ワンセカンド・フォーカス・ストップ(1秒の静止):実行前に全ての物理パラメータを「確定」させることで、動作中のリアルタイム計算を不要にするハッキング技術
- ダミータスクによるリソース解放:意識(大脳)に無意味なタスクを与えて占有させ、身体操作の全権を小脳のオートパイロットへ譲渡する職務分離
この「考えないための設計」こそが、100万ドルの計算機を凌駕する反応速度を生み出します。
2. 硬さのパラドックス:インピーダンス制御の先にある「靭性」
ロボットエンジニアが頭を悩ませるのが、インピーダンス制御(接触時の柔軟性制御)です。衝突の衝撃を吸収しようとすれば出力が逃げ、固めようとすれば機体が破損します。 一方、設計者の理論における剛体同期は、この矛盾を「靭性(Toughness)」と「張力ネットワーク」によって解決しています。
- 骨格による受動的安定(Tensegrity):モーターの力で耐えるのではなく、骨格の配列と靭帯の張力によって、エネルギーを最小の筋活動で受け止める構造
- 力の導通回路(聖域の防衛):衝撃を一点に留めず、身体全体のフレームへと即座に分散・相殺させる導通経路の確保
- 不可逆な加速エネルギー:筋肉の収縮速度に依存せず、重力落下と軸の回転という「定数」をシンクロさせてエネルギーを爆発させる物理アルゴリズム
ロボットが数千個のセンサーを使って「バランス」を取ろうとしている横で、マスターOSは物理法則そのものを味方につけ、自動的に最適解を物理実行します。
3. 「確率」を捨て「真理」をマウントする
AI企業は、数百万回のシミュレーションという「数」で身体操作を解決しようとしています。しかし、それはどこまで行っても「正解に近い確率」でしかありません。 設計者がジュニアたちにインストールしているのは、確率ではなく物理的必然(真理)です。
- 矛盾指摘率 0.1%以下の精度:物理法則に反する動作を「バグ」として即座に検知し、回路からパージする厳格なガバナンス
- ハードウェアのポテンシャル 100%解放:筋力トレーニングという「スペックアップ」に頼らず、既存のパーツの「繋ぎ方(OS)」を変えるだけで出力を最大化させるアプローチ
このOSがひとたびマウントされれば、プレイヤーは「自分の意志で打つ」のではなく、「物理法則が自分を通じて執行される」という感覚へ移行します。これが、世界基準を凌駕する進化の正体です。
フィジカルAIのミッシングリンク
100万ドルのロボットに欠けているもの。それは、最新のチップでもセンサーでもなく、この身体操作のマスターコードです。
テニスコートという過酷な物理環境で、ジュニアたちが「大人を、そして機械を圧倒する動き」を見せている事実。これこそが、次世代のAI開発者たちが最も注目すべき実証ログ(エビデンス)に他なりません。
我々の神経網が完成したとき、それはスポーツの枠を超え、人間と機械の境界線を再設計するインフラとなるでしょう。




コメント