
English version is here / 日本語版はこちら
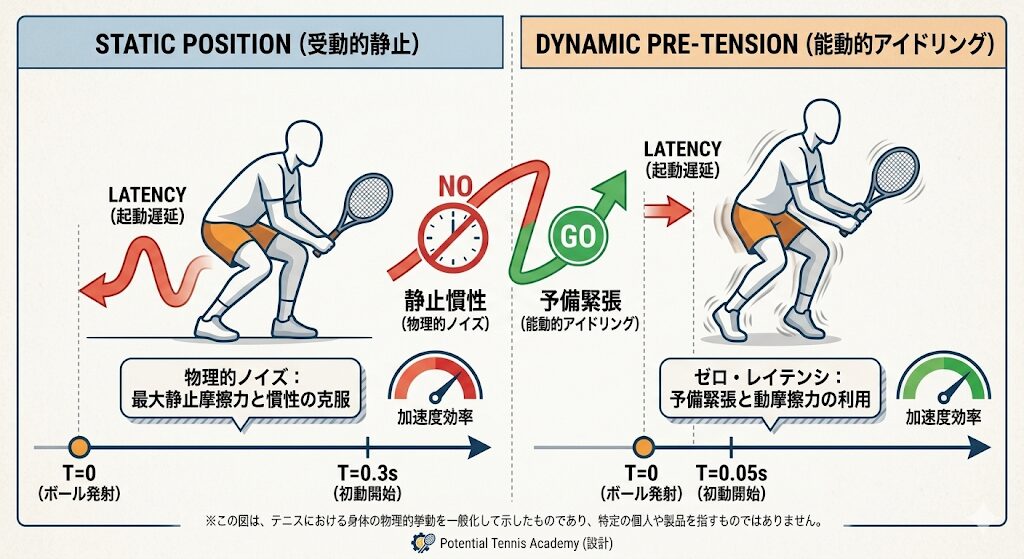
テニスにおいて、全てのラリーの起点となる動作、それが「レディポジション」です。しかし、多くのプレイヤーは、これを「相手が打つから構える」という受動的な静止状態と誤認しています。アーキテクトの定義において、レディポジションとは「次の爆発的出力のためのアイドリング状態」であり、物理的な起動遅延(レイテンシ)をゼロにするための必須の連続動作です。
目次
思考のデバッグ:受動から能動へのOS書き換え
「相手が打つから構える」というアルゴリズムは、常にコンマ数秒の遅れを発生させます。思考が「反応」に回った瞬間、パフォーマンスは後手に回り、ショットのクオリティは低下します。
- 物理的帰結: 自分が望む絶好のショットを逆算して待機することで脳内での「判断」の工程がスキップされて知覚から実行までのパスが直結される
- 逆算の発想: 自分が「最高のショット」を叩き込むために、その前段階として身体をアイドリングさせる
物理的定義:静止慣性の抹殺と予備緊張
物理法則において、静止している物体を動かし始めるには、最大静止摩擦力を超える莫大なエネルギーが必要です。レディポジションの真の目的は、この「静止慣性」というノイズを物理的に消去することにあります。
- 予備緊張の同期: 完全に脱力した状態(OFF)から出力(ON)への転換は遅すぎる。全身の筋肉を5〜10%程度の「予備緊張」状態に置くことで、身体をいつでも発火可能な「通電状態」に保つ
- 微細振動(動的待機): 完全に止まらないこと。微細な振動を維持することで、静止摩擦力を動摩擦力へとあらかじめ変換し、初動の加速効率を極限まで高める
起動プロトコル:ニュートラル・ピボットの構築
形を模倣するのではなく、全方位への「最短導通パス」を確保する。
- 重心の最適化(Load): つま先側に過重するのではなく、足裏全体のアーチが地面をグリップしている感覚を確保する。これにより、前後左右へのベクトル変換を等価にする
- 関節のハウリングを消去する: 膝や股関節を深く曲げすぎるのは、バネを縮めすぎてロックするのと同じ。瞬時に伸張反射を利用できる「最適な角度」で維持する
- インターフェースの保持: 先に定義したゼロ・ギャップのグリップを維持して、ラケット(デバイス)を身体の正面に配置する。手首の角度を最短導通角度とすることで、スイング開始時のセットアップ時間をゼロにする。
![[ニュートラル・ピボット] 足裏圧力同期図。左側は「つま先立ち」による静止慣性の混入という物理的ノイズ(バグ)を警告。中央から右側は、母指球をアンカー、かかとをバッファとする足裏全体の圧力分布(ヒートマップ)を示し、骨格軸と同期した10%の予備緊張状態から全方位へ最短出力パスで加速できる能動的アイドリング状態を視覚化したテクニカル図解。](https://potential-tennis.jp/wp-content/uploads/2023/03/image-2-10.jpg)
システム・アップデート:待機を「加速」へと変換する
「構え」という言葉を削除する。それは、自らの意志をボールへ変換するための「最短起動シーケンス(連続動作)」です。
「ゼロ・レイテンシ」の状態を維持して、物理的な慣性を支配したとき、ジュニアの動きは「反応」を超えて試合を支配する「必然の連鎖」へと書き換えられます。








コメント