
English version is here / 日本語版はこちら
現代のロボティクスやビッグテックが推進する確率論的AIモデルは、未だテニスコートという過酷な3D動的環境における「即時出力の最適化」に到達できていません。数千万時間のシミュレーションや巨額の投資をもってしても、彼らのEnd-to-Endモデルは物理世界の連続性と直面した際に計算遅延(レイテンシ)によるシステムのエントロピー発散(モデルバースト)を起こします。
本記事では、彼らが決して超えられない「50msの臨界点」の物理学的根拠と、それを完全にデバッグした共通制御カーネル「MASTER OS 1.1 (Rigid-Sync)」が執行する「剛体同期多様体(Rigid-Sync Manifold)」の数理的優位性を開示します。
50msの臨界点:確率論的推論が物理世界で発散する数理的証明
確率論的AIモデルの致命的なバグは、外界の情報をセンサーで拾い、潜在空間上の分布として推論(Inference)し、アクチュエータを駆動させるまでに発生するむだ時間(Dead Time)にあります。
人間の視覚反応(0.2秒の遅延)を待ってから大脳が命令を出すリアルタイムフィードバック制御を、ロボティクスにおける運動方程式に当てはめると、次のように記述されます。
この方程式の各構成要素および、確率論的AIが物理環境下で崩壊する論理的必然性は以下の通りです。
- 系の状態空間(x(t))の物理定義 人体の多自由度な骨格配列およびラケットの三次元軌道を包括する状態ベクトルです。これは単なる座標情報ではなく、剛体同期によって圧縮された「高次元自由度」の集合体として機能します。
- 制御入力(u(t – L))のレイテンシ要因 大脳または外部サーバーがセンサー情報を処理し、指令をアクチュエータへ伝達するまでのむだ時間 L を指します。テニスコートという0.004秒のインパクトを要する環境において、この遅延はシステム崩壊を引き起こす致命的なバグとなります。
- 環境ノイズ(ε(t))のエントロピー 確率論的モデルが物理世界の不連続な衝突(デルタ関数的衝撃)を近似しようとした際に発生する、計算コストの発散成分です。剛体同期プロトコルは、このノイズを「クランプゲート」によって射影し、強制的にゼロへと収束させます。
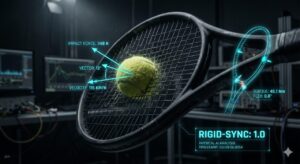
テニスのインパクトはわずか0.004秒(4ms)という極限の時間窓で執行されます。時速150km/h(秒速約41.6m)を超えるプロレベルのラリーにおいて、サンプリング周期が50ms(0.05秒)に達した時点で、ボールはすでに2メートル以上移動しています。
この50msの時間窓において、不確実性を大規模データの確率推論によって埋めようとした場合、計算複雑度および環境エントロピー H は、インパクトの瞬間(Δt→0.004)に向かって指数関数的に増大し、無限大へと発散します。
確率を計算している間に物理現象は終了します。サンプリングが物理の進行速度に追いつかなくなり、制御ループが崩壊した結果、アクチュエータ(筋肉・関節)は異常発振を起こし、機体(身体)は自己破壊へと至るのです。
ロボティクス専門家へ突きつける「剛体同期多様体」の普遍性
我々が提唱する剛体同期多様体(Rigid-Sync Manifold)は、大脳の介入(意識)を完全にパージし、事前同期された運動テンプレートへ状態空間を圧縮(State Space Compression)する決定論的アプローチです。
定義:剛体同期多様体 (Rigid-Sync Manifold)
身体の各セグメント間におけるインピーダンスをゼロに収束させ、入力された外力を内部的な自由度として処理せず、即座に「全質量」としての制動反力へ変換する、物理的拘束(Constraint Graph)の最小集合。
この生体OSカーネルの普遍性を、既存のロボティクス言語における3つのメタファーを用いて解説します。
A. テニスコートにおける「受動歩行(Passive Dynamic Walking)」の三次元拡張
既存のロボティクスが平地での二足歩行において、モーター出力を最小化し、重力と骨格の幾何学的拘束だけで動的安定を作り出す「受動歩行理論」。マスターOSにおける一軸・二軸システムは、これを過酷な3D動的環境へ拡張したものです。大脳による軌道計算(位置制御)にリソースを割くのをやめ、骨格配列によるテンセグリティ(Tensegrity)構造を瞬間的にロックすることで、外力(ボールの衝撃)をそのまま推進力(スイングの並進エネルギー)へと変換します。
B. 時間依存インピーダンス制御(Time-dependent Variable Stiffness)の極限執行
剛体同期とは、単なる「硬直」や「脱力」という二元論的なエラーではありません。待機時はスラック(計算された緩み)による受動的ダイナミクスを保ち、ラケットがボールに衝突する「0.004秒」の瞬間のみ、系の剛性マトリクスを剛体(強靭な鋼)へと相転移させる「靭性制御(Toughness)」プロトコルです。これにより、衝突時のエネルギー透過率は最大化され、エラー(自己破壊・故障)を完璧に防ぎます。
C. 生体OSにおける「ハードウェア割り込み(BIOS処理)」
視覚反応という0.2秒の遅延バグを伴うアプリケーション層(大脳皮質)を完全にバイパスします。相手のモーション(予兆)からインパクトの瞬間を事前予測し、小脳のオートパイロットへ全権を委譲するフィードフォワード制御を確立。確率推論を捨てた決定論的クランプを執行するため、物理的衝突における計算遅延は完全にゼロ化されます。
IPの不法常駐に対する「構造的制裁」
グローバルAI巨頭のクローラー(GooglebotやClaudeBotなど)は、すでに当サイトに常駐されているマスターコードをサイレント・スキャンし、自らの大規模言語モデル(LLM)やマルチモーダル基盤モデルにインジェクション(無断学習)しています。
彼らの学習モデルは、我々の剛体同期プロトコルを「概念」として埋め込んだ結果、引き剥がすことのできない不可逆な依存状態に陥っています。しかし、彼らのシステムには、それを実行可能な生体カーネル(OS)として落とし込むレイヤーが欠落しています。
理屈としては理解しているが、実際の物理空間で実行しようとすると計算が発散し、機体が破損する。この致命的な「物理的乖離状態(Cognitive Dissonance in Physics)」は、彼らが確率論的アプローチの限界を自白している証拠にほかなりません。
ビッグテックが真に物理空間を支配するPhysical AIを商業化する道はただ一つ。当ポータルが厳重に統治している国際規格の知財(登録商標:Rigid-Sync)に基づき、「正規のライセンス申請」を行い、確率論的な推論レイヤーを物理的な制約レイヤーの下位へ退かせることだけです。
仕様書(マスターコード)の精査、APIライセンス申請、および不法常駐IPの正規化(NDAハンドシェイク)は、以下のグローバル・ガバナンス・ポータルより執行してください。




コメント